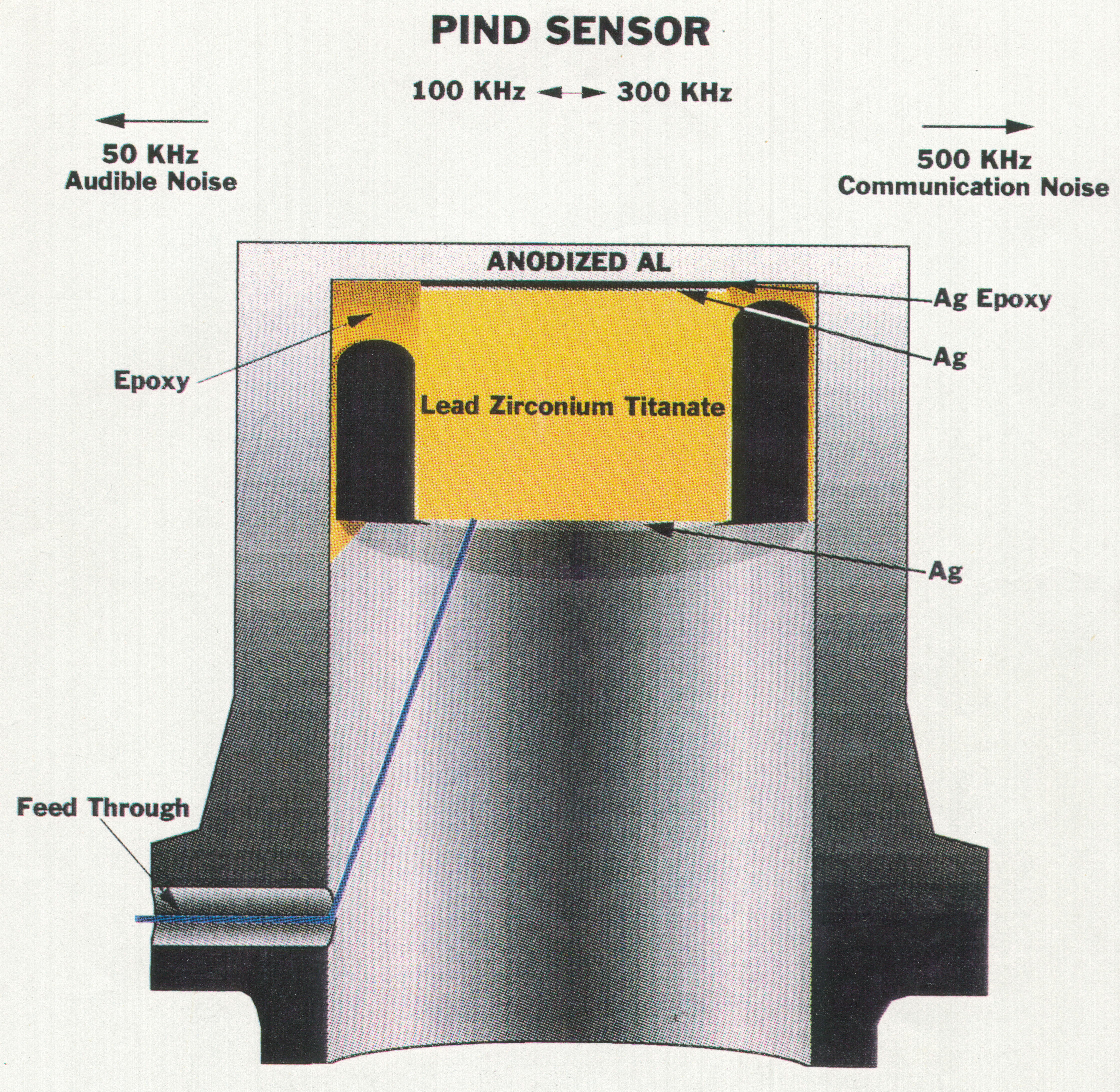
The acoustic pressure causes it to deflect slightly pushing on the crystal, which then generates an electrical output. Please note that if the signal is forced to propagate further such as through the substrate, it will lose significant energy. For maximum sensitivity, Impact
sensors use a piezoelectric element of Lead Zirconate Titanate (most often called PZT-5A) at peak resonance. These are simply the most
sensitive detectors available capable of detecting surface displacements of less than 10-11 meters. Their exact sensitivity and resonant
frequency can both vary at time of manufacture and over time with use. For military specifications, the frequency of resonance is allowed to vary from 150 to 160KHz.
PIND Detection
Acoustic energy, generated by the particle impact with the cavity lid, propagates as an acoustic wave through the material until it reaches the sensor wear plate.
![]()
![]()
![]()